Featured Projects

Path Planning for Turtlebot4
A course project that involved developing an A* path planning algorithm for the Turtlebot4 to navigate in an given environment. Designed for both simulation and hardware!

Localisation of UAVs in Indoor Corridor Environments
Developed GPS-free localization for UAVs in indoor environments, enabling precise path following with minimal deviation in translation and orientation.

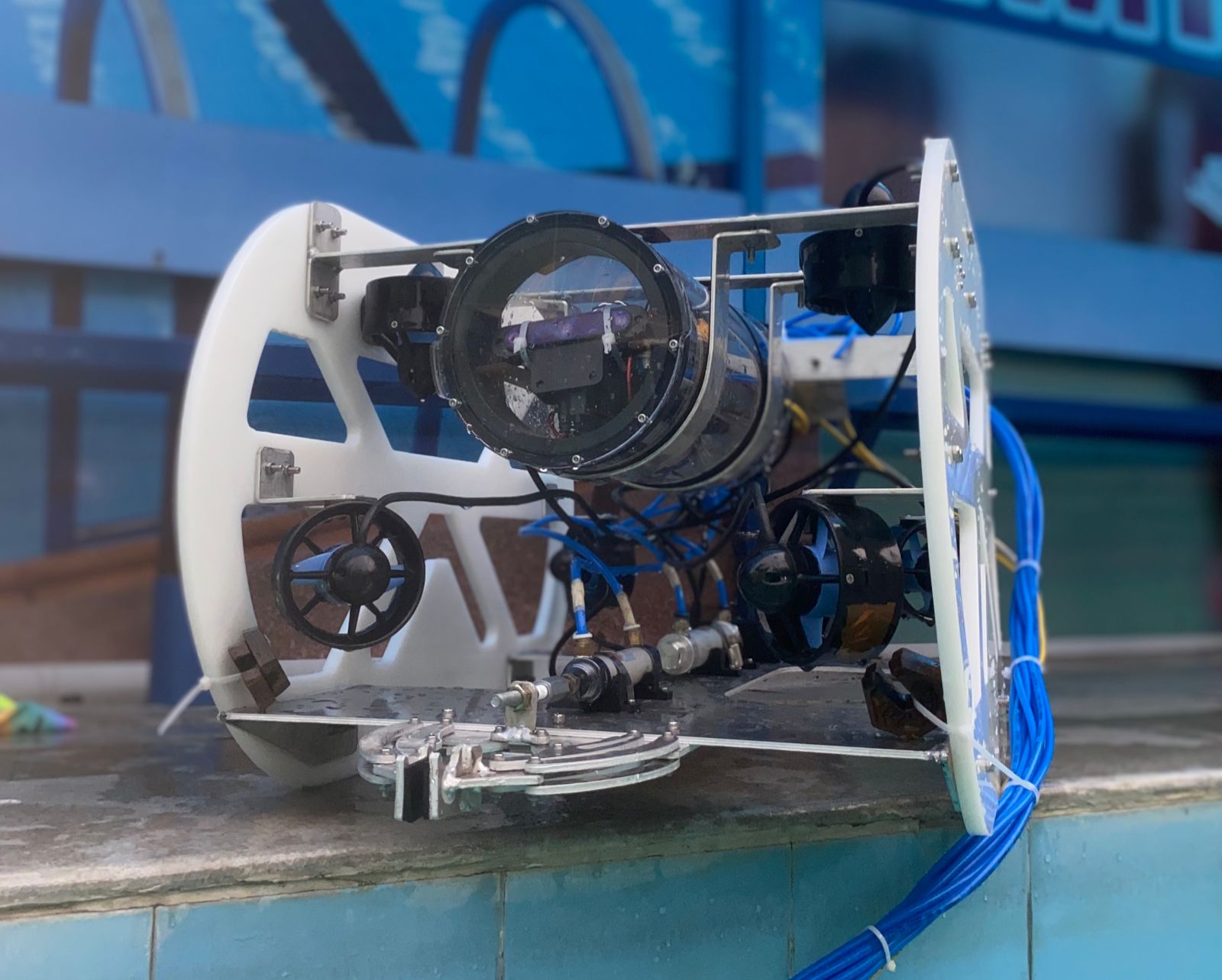
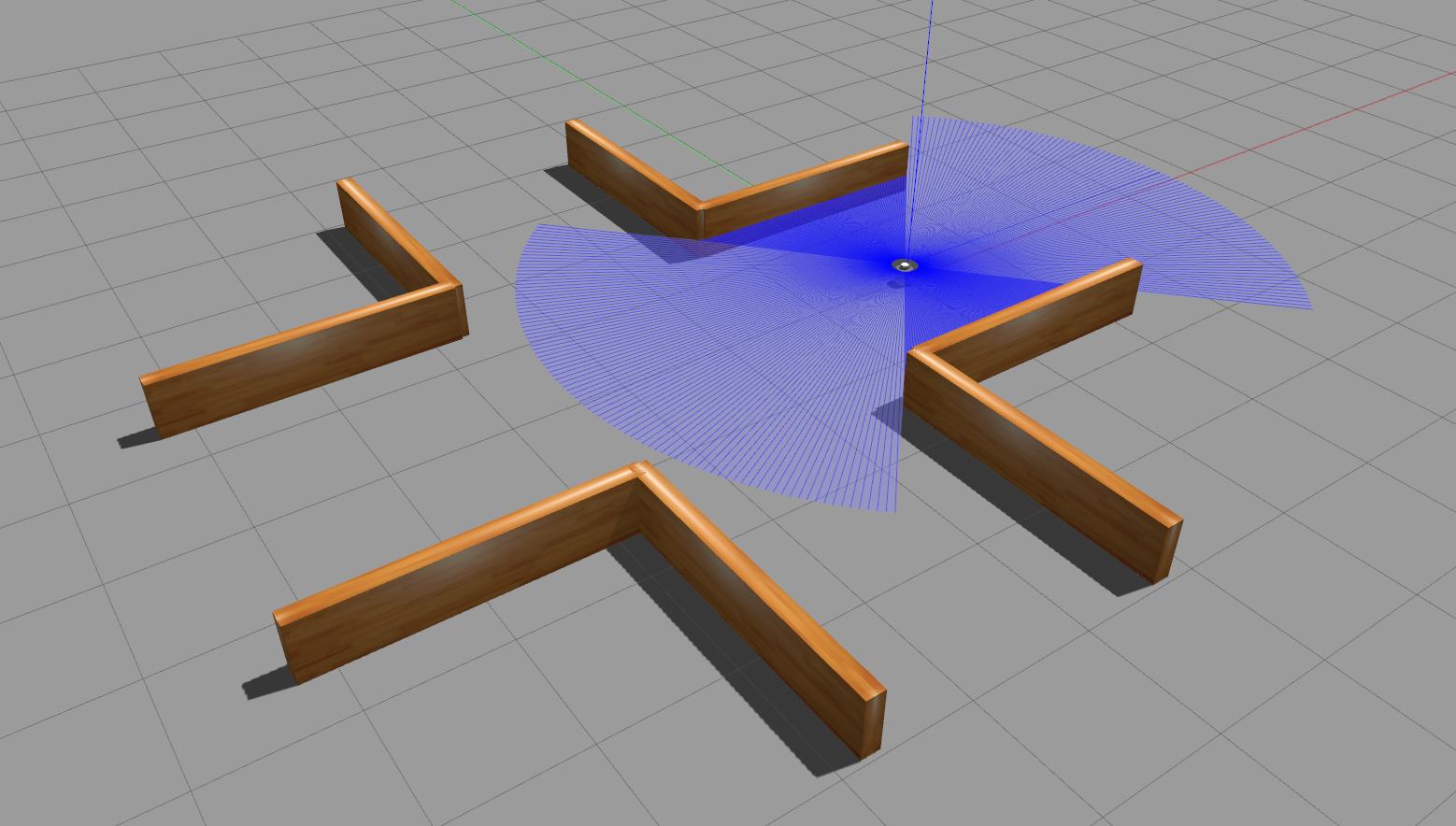
Autonomous Navigation Planner for AUV Nemo
Developed an Autonomous Underwater Vehicle with 6 DOF featuring 3D Visualised Oak-D Series 3 Camera for autonomous navigation in SAUVC 2022, Singapore.
Control System Integration for ROV Marty
Developed a hybrid vehicle capable of operating as both AUV and ROV for the MATE-ROV World Championship 2023.

Traff Analyser
Analyzes traffic conditions using sensor data to predict traffic trends at different junctions using a CNN model.
TCAS System
Multi-robot monitoring system that identifies potential junction regions where robots might converge and regulates their passage to prevent close proximity interactions.

Aquatic Animal Classification
Implemented three Deep Learning Models for aquatic animal classification, comparing accuracy outcomes and creating a web application classifier.