Hello!
I'm Venkata Madhav
Building the future of robotics 🤖
Specializing in autonomous systems, computer vision, and multi-robot coordination. Currently pursuing a Master's in Robotics at the University of Maryland, College Park.
I'm Venkata Madhav
Building the future of robotics 🤖
Specializing in autonomous systems, computer vision, and multi-robot coordination. Currently pursuing a Master's in Robotics at the University of Maryland, College Park.
I am a Master of Engineering student in Robotics at the University of Maryland, College Park. I specialize in software-driven robotics, including ROS1&2, C++, Python, and Gazebo. My passion lies in underwater and aerial robotics, focusing on control, planning, and perception.
I enjoy solving complex problems in autonomous systems and have hands-on experience with autonomous underwater vehicles, robotic manipulators, and multi-robot systems.
Enhancing autonomous navigation capabilities for underwater vehicles.
Developing perception systems for autonomous vehicles.
Understanding and optimising multi-robot swarms for complex environments.
Designing and implementing control systems for robotic platforms and autonomous vehicles.
Master of Engineering, Robotics
College Park, MD, USA
Fall 2024 - Spring 2026
CGPA: 3.78/4
BTech, CSE
Kancheepuram, Chennai, India
2020-2024
CGPA: 8.97/10
Intermediate
Visakhapatnam, India
2018-2020
CGPA: 9.94/10
High School
Vizianagaram, India
2018
CGPA: 10.0/10.0
IEEE OCEANS 2024 Conference, Singapore
View PublicationPresented a paper at the prestigious IEEE OCEANS 2024 Conference at Singapore.
My team got shortlisted to participate in the MATE-ROV World Championship both in the year 2022 and 2023.
My team was among the top 20 teams in the SAUVC Competition 2022, which was held in Singapore.
Selected as one of the top 30 teams for the 2022 VRX Competition.
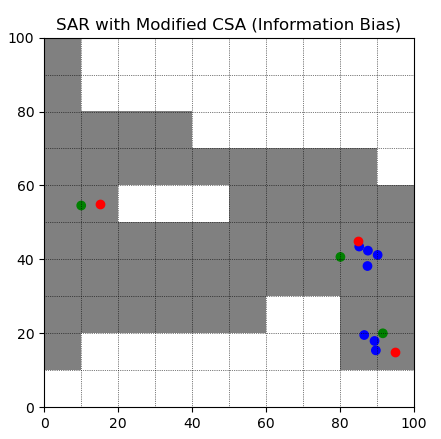
This project aims to develop an autonomous surface swarm system with bio-inspired flocking for search tasks, with adaptive formation control in a simulated ocean environment using a decentralized control system to enable minimal communication while maintaining coordination.

This project involved multiple perception challenges to successfully navigate a robot through a given environment with ArUco markers and different obstacle scenarios.
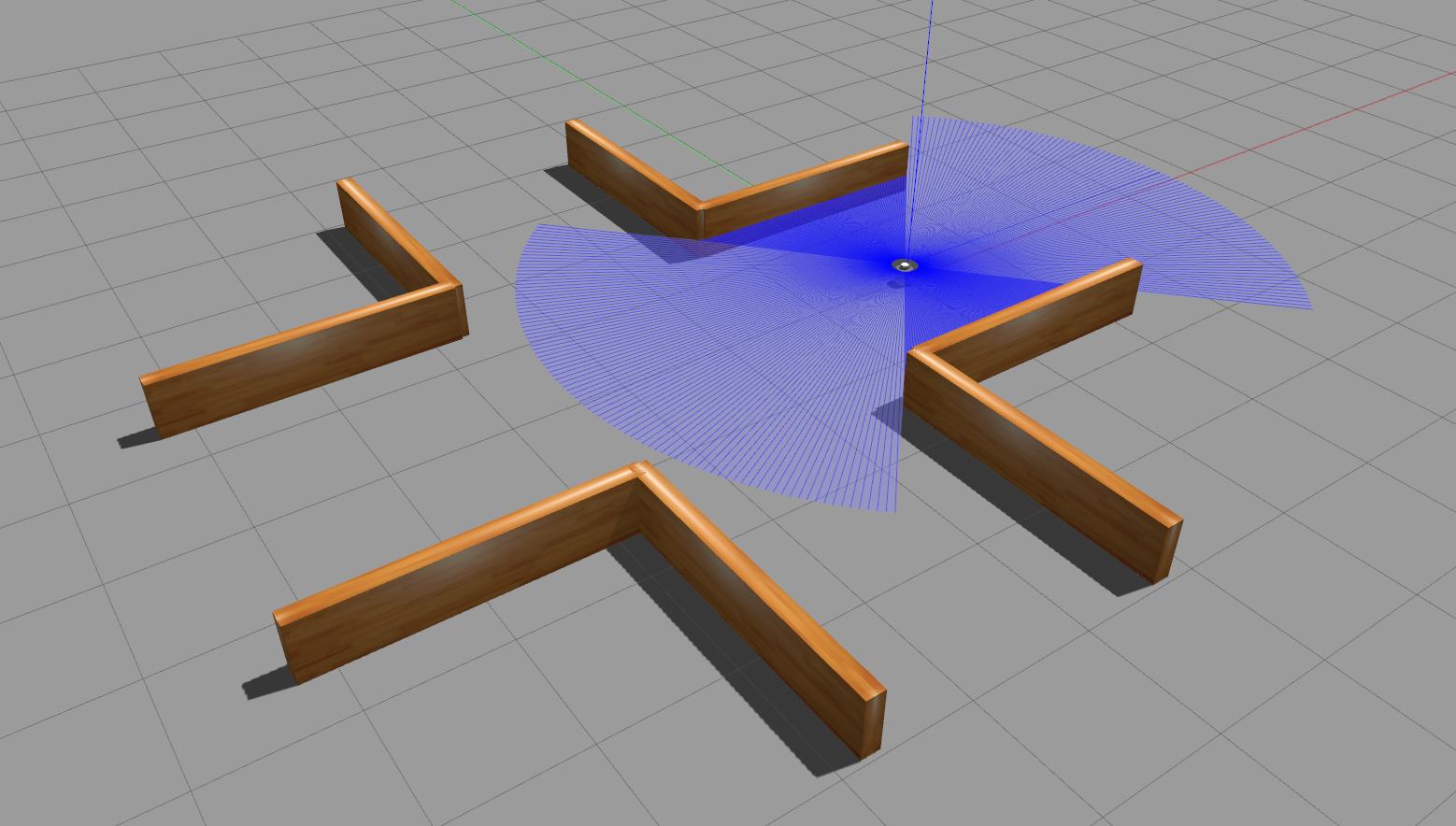
A course project that involved developing an A* path planning algorithm for the Turtlebot4 to navigate in an given environment. Designed for both simulation and hardware!

Developed GPS-free localization for UAVs in indoor environments, enabling precise path following with minimal deviation in translation and orientation.

This study showcases the implementation of the YOLOv8 CNN model for automated coral health assessment. The model classifies coral into three categories, achieving an accuracy of 78%.

Developed an Autonomous Underwater Vehicle with 6 DOF featuring 3D Visualised Oak-D Series 3 Camera for autonomous navigation in SAUVC 2022, Singapore.
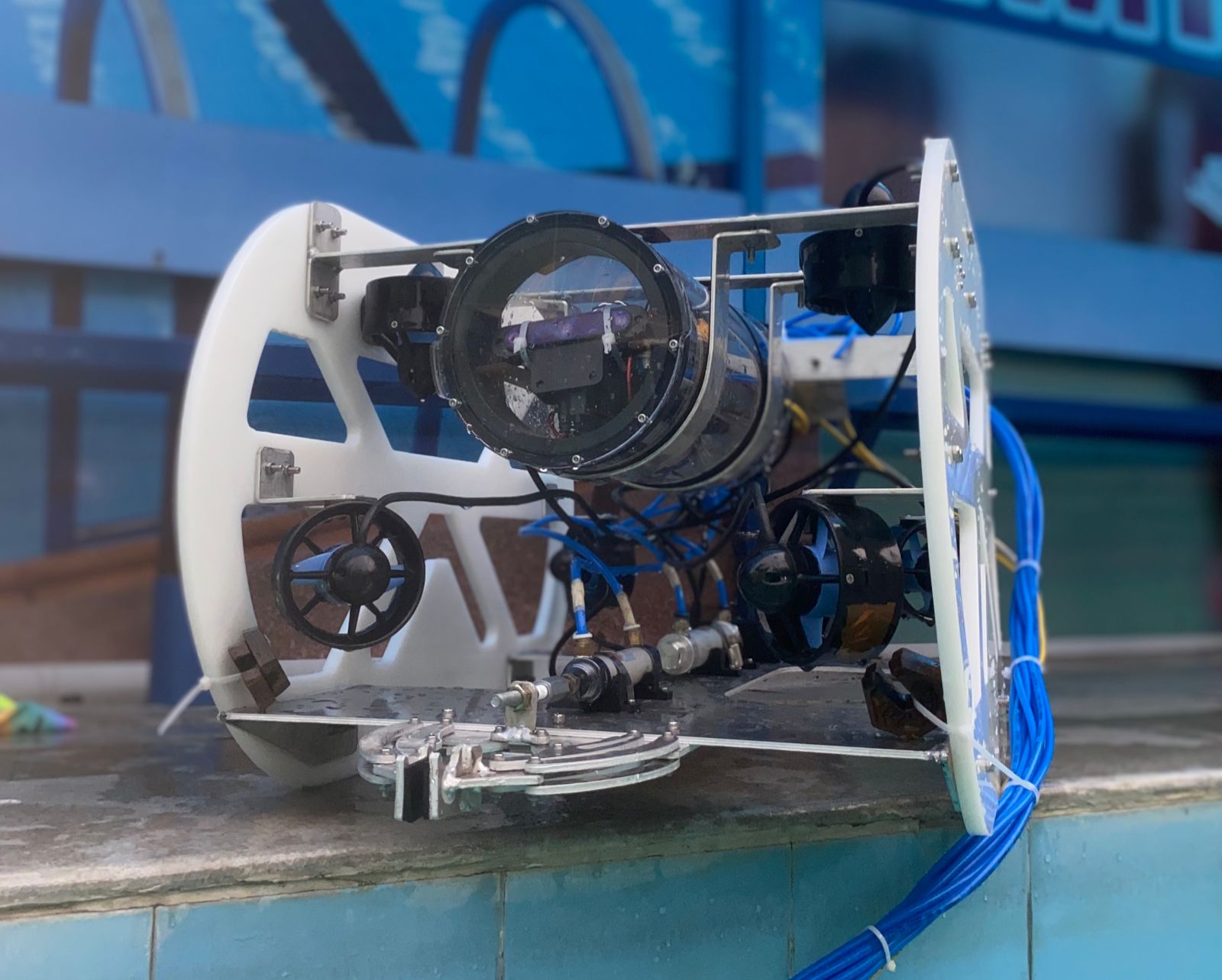
Developed a hybrid vehicle capable of operating as both AUV and ROV for the MATE-ROV World Championship 2023.
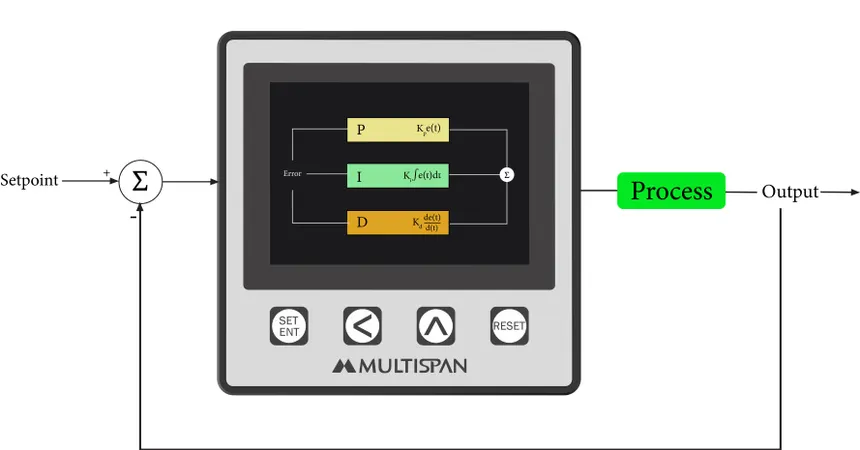
This project implements a PID (Proportional-Integral-Derivative) controller for Acme Robotics' mobile robot platform.
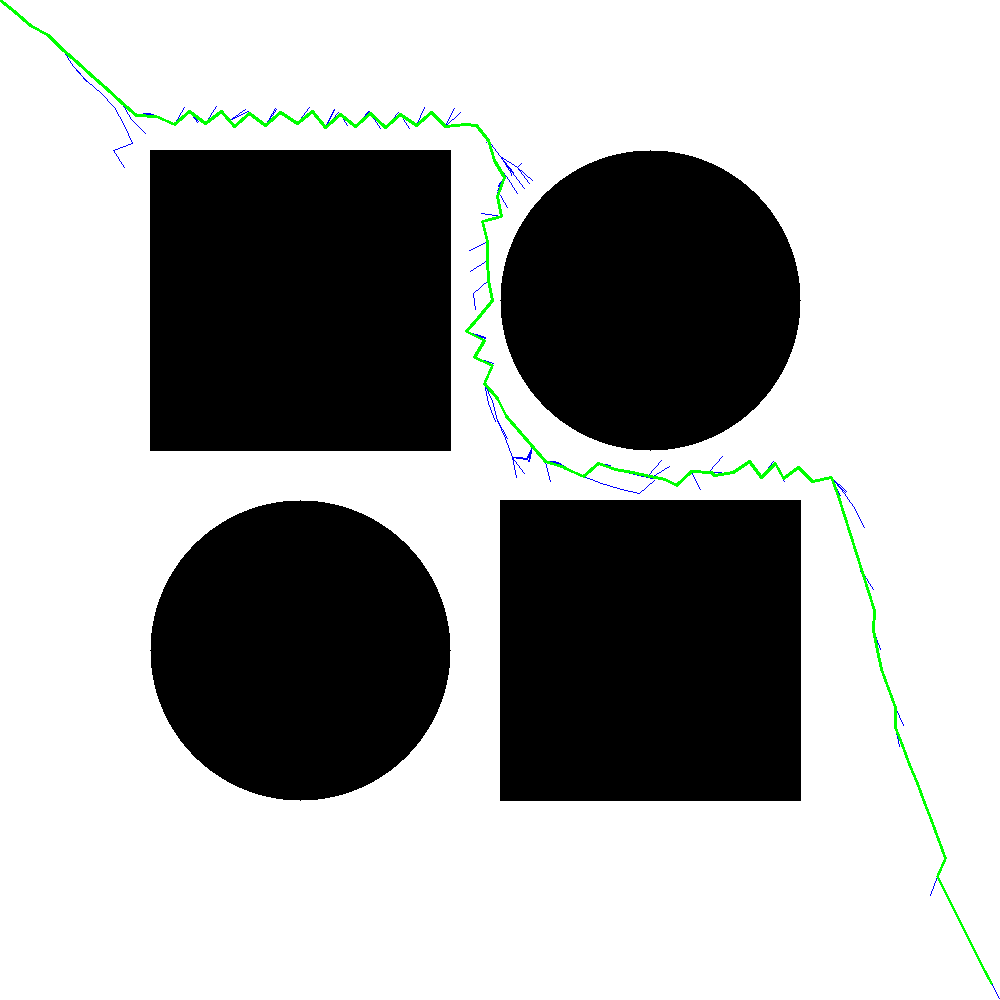
This project is a successful implementation of the Improved A-RRT* path planning algorithm in a 2D grid-based simulation environment using Python and OpenCV.
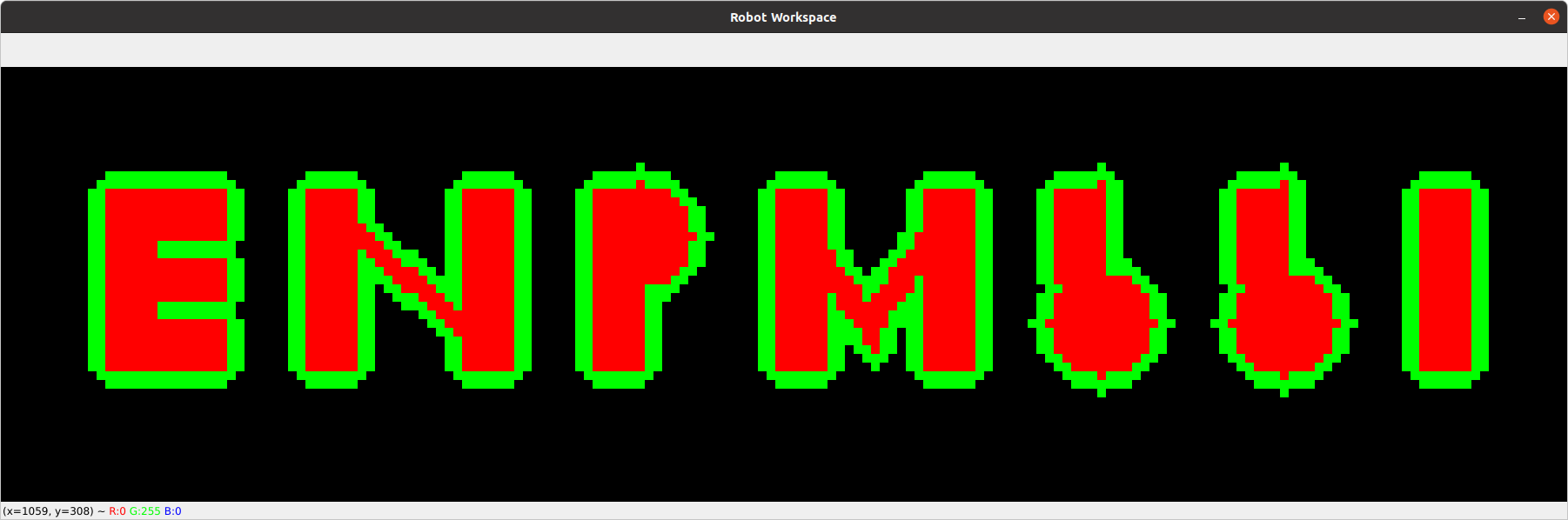
This project implements BFS and Dijkstra's algorithm for path planning a point robot in a 2D workspace with obstacles. The obstacles are represented by the text "ENPM661" with a clearance of 2mm.

Analyzes traffic conditions using sensor data to predict traffic trends at different junctions using a CNN model.
Multi-robot monitoring system that identifies potential junction regions where robots might converge and regulates their passage to prevent close proximity interactions.

Implemented three Deep Learning Models for aquatic animal classification, comparing accuracy outcomes and creating a web application classifier.
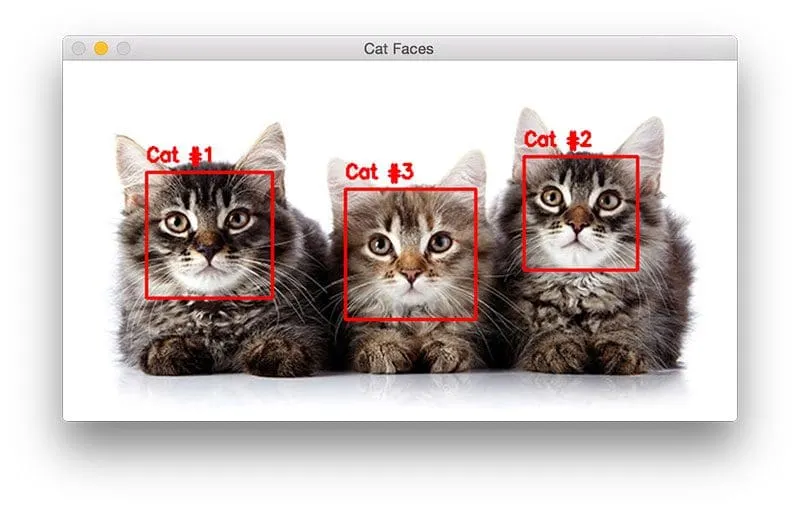
A basic face detection application built using Flask and Haar Cascade Face Detection using Python.
As a Robotics Engineer, I specialize in developing autonomous systems and robotic solutions. My expertise spans across programming, robotics frameworks, and creative tools, enabling me to build innovative solutions for complex challenges in underwater and aerial robotics.











MTS EMERGE Cohort
ROS Certified Developer
SAUVC 2022 Finalist